








 1m")
X
-
Załączniki bezpieczeństwa
Załczniki do produktuZałączniki dotyczące bezpieczeństwa produktu zawierają informacje o opakowaniu produktu i mogą dostarczać kluczowych informacji dotyczących bezpieczeństwa konkretnego produktu
-
Informacje o producencie
Informacje o producencieInformacje dotyczące produktu obejmują adres i powiązane dane producenta produktu.MATEK
-
Osoba odpowiedzialna w UE
Osoba odpowiedzialna w UEPodmiot gospodarczy z siedzibą w UE zapewniający zgodność produktu z wymaganymi przepisami.
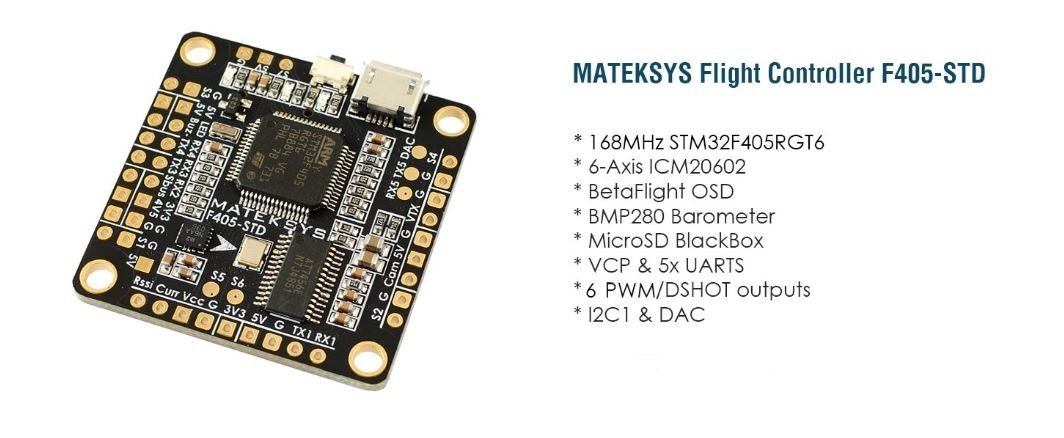
MATEK F405-STD
Kontroler lotu F4
Gyro : MPU6000
Baro : BMP280
Blackbox: MicroSD
BEC 5V - Brak
5x UART
Wymaga znajomości programowania i obsługi kontrolerów lotu.
Polecane oprogramowanie: Beta Flight lub INAV "MATEKF405" od Betafligt 4.1.X "MATEKF405STD (MTKS)"
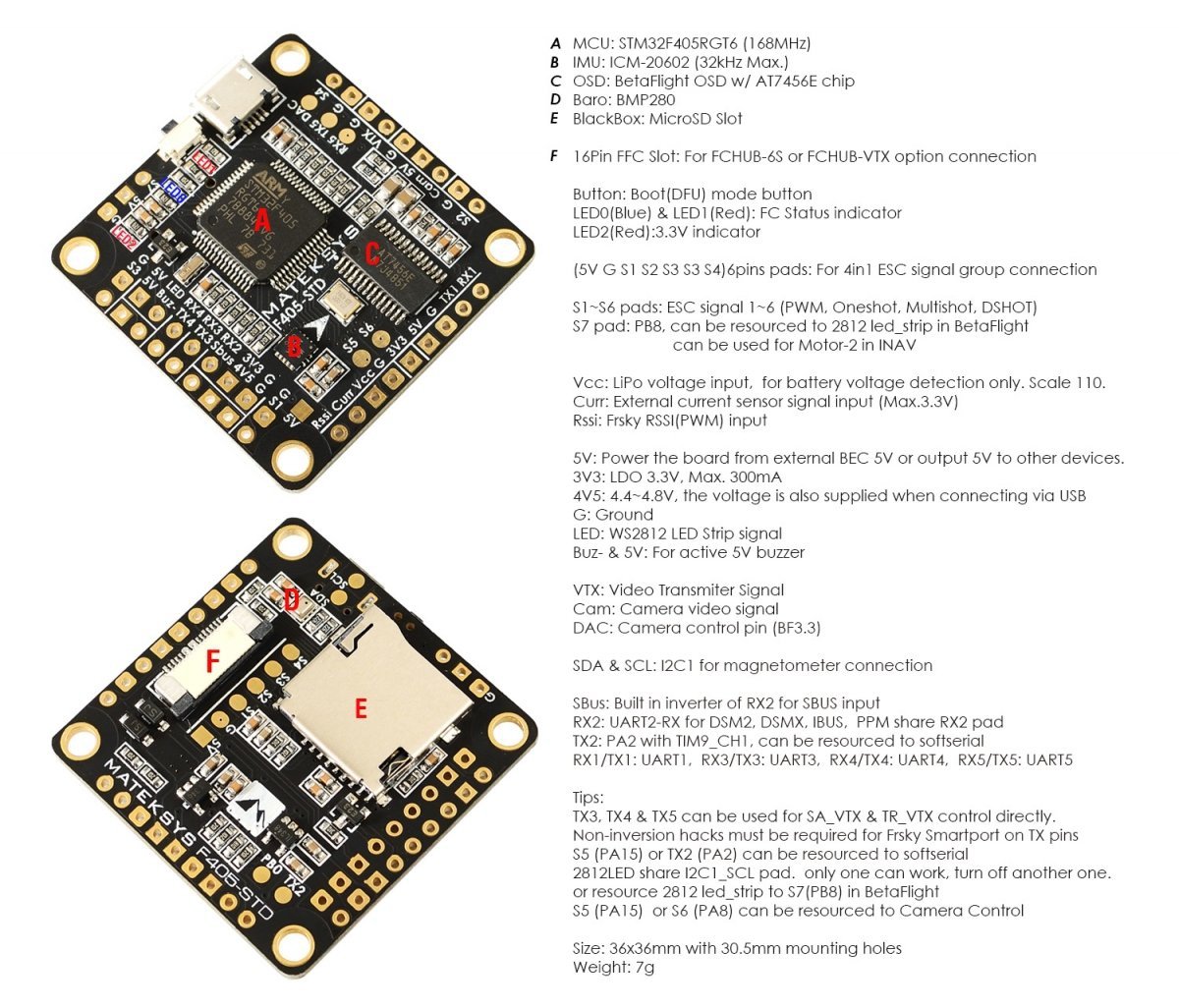
FC Specifications
- MCU: 168MHz STM32F405RGT6
- IMU: 32K ICM20602 gyro/accelerometer (SPI)
- Baro: BMP280 (I2C)
- OSD: BetaFlight OSD w/ AT7456E chip
- Blackbox: MicroSD card slot (SD/SDHC)
- VCP, UART1, UART2, UART3, UART4, UART5
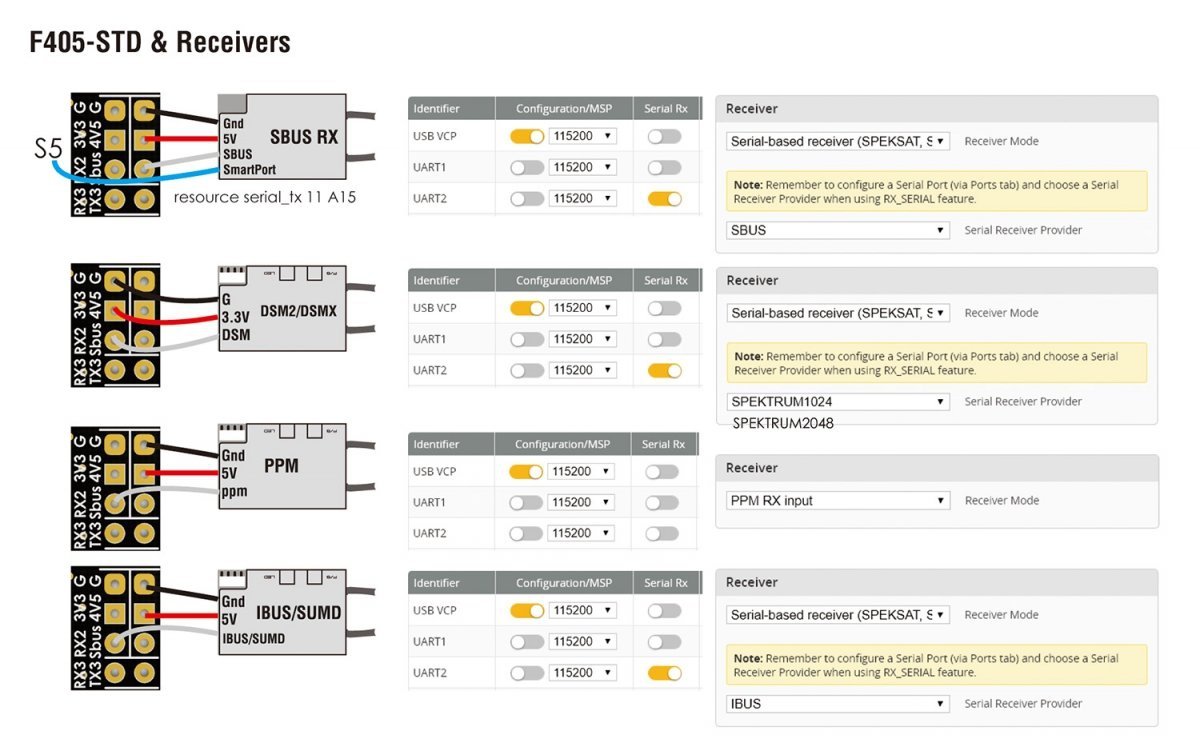
- Built in inverter for SBUS input (UART2-RX)
- PPM/UART Shared: UART2-RX
- SoftSerial on TX2, S5 or S6 optional
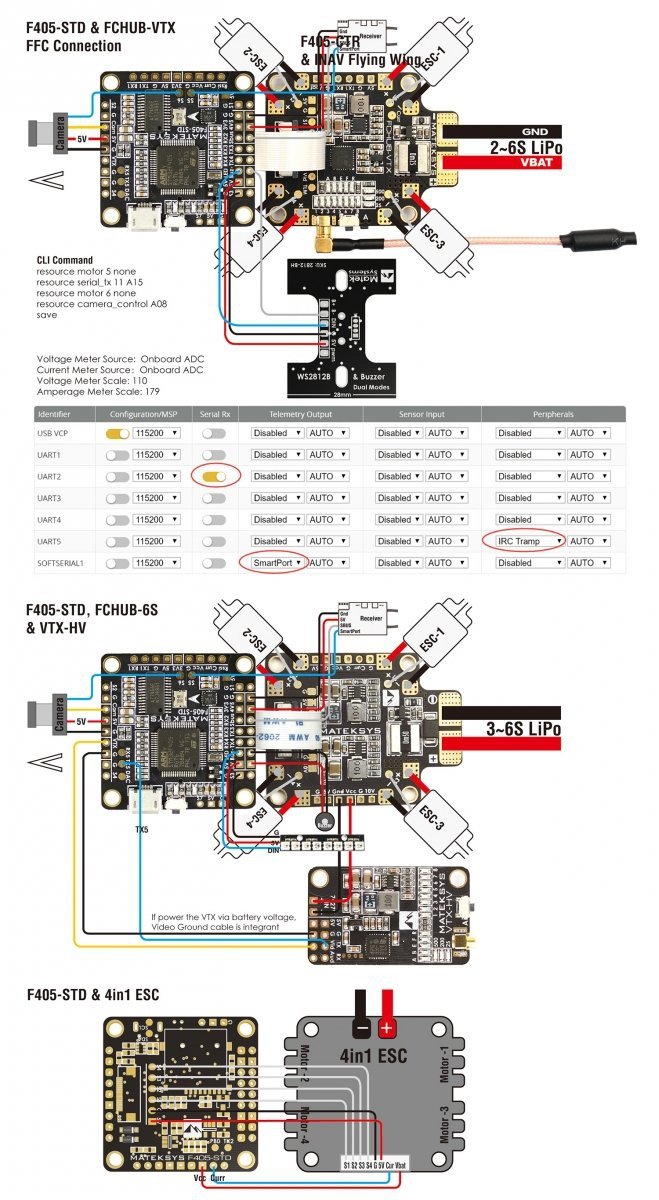
- Camera control on S6 or DAC optional
- Smartaudio & Tramp VTX protocol supported
- Battery Voltage Sensor: 1:10
- Current Sensor: No (FCHUB-6S, FCHUB-VTX, FCHUB-W option)
- BEC 5V: No (FCHUB-6S, FCHUB-VTX, FCHUB-W option)
- LDO 3.3V: Max.300mA
- I2C1 SDA & SCL: Yes
- WS2812 Led Strip : Yes
- Beeper : Yes
- RSSI: Yes
- 3x LEDs for FC STATUS (Blue, Red) and 3.3V indicator(Red)
- 6x PWM / DShot outputs without conflict
- 2x 2812LED outputs option
- 5x UARTs
- 1x Group of 5V/G/S1/S2/S3/S4 pads for 4in1 ESC Signal/GND
- 4x pairs of corner pads for ESC Signal/GND connections (DSHOT compatible)
- 1x pair I2C1 pads
- 1x Side-press button for BOOT(DFU) mode
- 1x 16pin bottom mounted FFC Slot for FCHUB-6S, FCHUB-VTX or FCHUB-W connection
- 36x36mm PCB with 30.5mm mounting holes
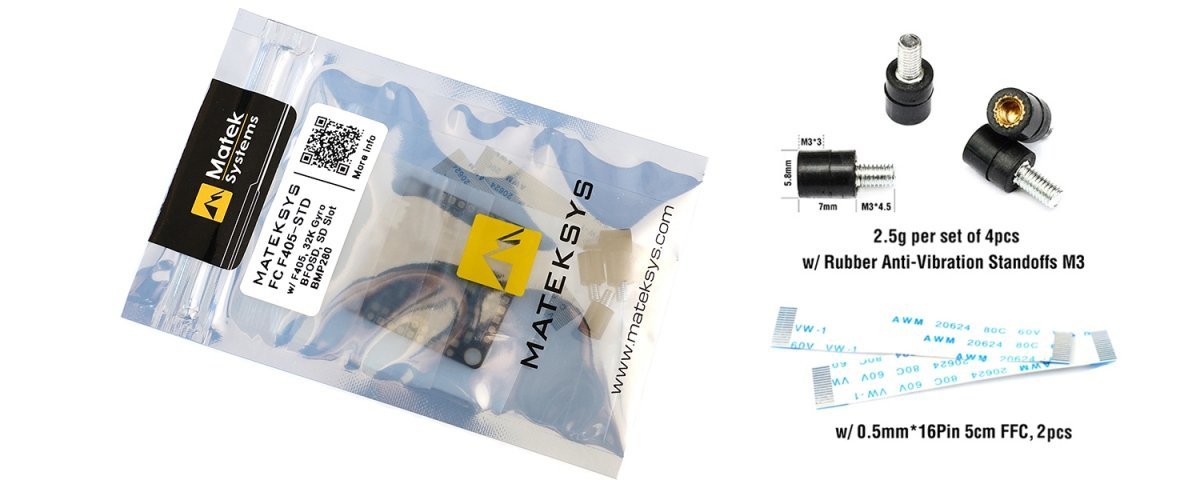
- w/ 2x 0.5mm*16Pin 5cm Flexible Flat Cable
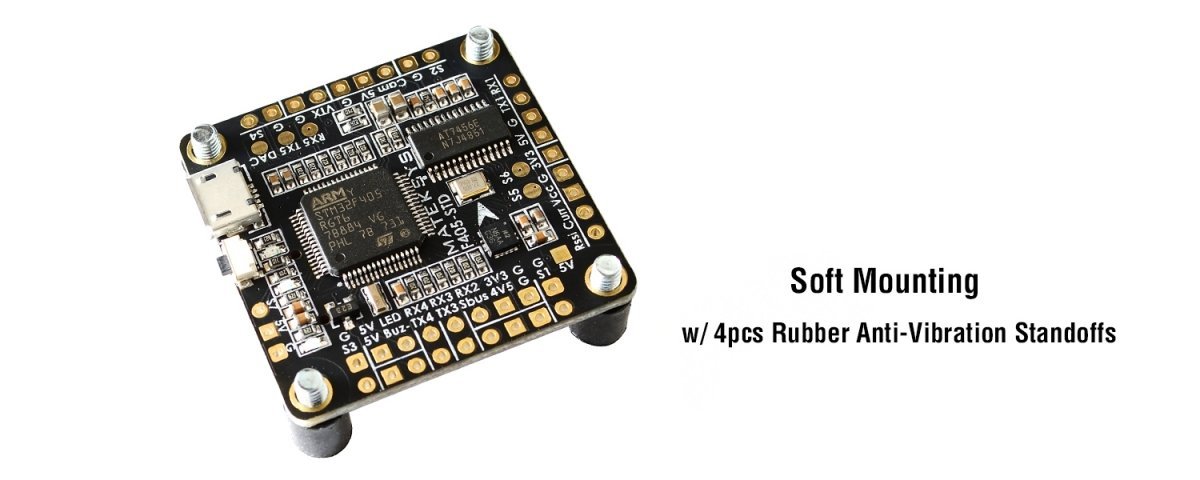
- w/ 4pcs M3 Anti-vibration Standoffs
TIPS
- CLI “defaults” after reflashing
- Rubber anti-vibration standoffs are necessary to avoid the vibration woes.
- Put a piece of sponge on the barometer to reduce the impact of airflow.
- If you are using 5V VTX, Pls power the VTX via the 5V pad on FCHUB. The ribbon cable can’t bear heavy current.
- BF/ 2812LED_Strip share I2C1_SCL pad as default. either enable LED_Strip, or enable Baro.
- BF/ 2812LED can be resourced to S7 (PB8) if using Baro the same time with BF firmware
- INAV/ Softserial_TX1 is on TX4 pad & Softserial_TX2 is on TX2 pad if CPU based serial port is enabled since 2.0.1
Tips: Pull out the plastic locking bar carefully so as not to break it.
Betafligh Pins Definition
| Pad/Hole | PIN | TIM | Resource option |
| PPM | PA3 | TIM5_CH4 | |
| S1 | PC6 | TIM3_CH1 | |
| S2 | PC7 | TIM8_CH2 | |
| S3 | PC8 | TIM8_CH3 | |
| S4 | PC9 | TIM8_CH4 | |
| S5 | PA15 | TIM2_CH1 | serial_tx 11, camera_control |
| S6 | PA8 | TIM1_CH1 | serial_tx 11, camera_control |
| 2812 LED Strip | PB6 | TIM4_CH1 | |
| S7 | PB8 | TIM4_CH3 | LED_STRIP |
| TX4 | PA0 | TIM5_CH1 | serial_tx 12 |
| RX4 | PA1 | TIM5_CH2 | serial_rx 12 |
| TX2 | PA2 | TIM9_CH1 | serial_tx 11 |
| DAC | PA4 | no function |
- S5 (PA15) , S6(PA8) or TX2 (PA2) can be resourced to softserial for Frsky SmartPort
- 2812LED_Strip share I2C1_SCL pad as default. either enable LED_Strip, or enable Baro.
- 2812LED can be resourced to S7 (PB8) if using Baro the same time with BF firmware
- S5 (PA15) or S6 pad (PA8) can be resourced to Camera Control
CLI command
- resource motor 5 none
- resource serial_tx 11 A15
- resource motor 6 none
- resource camera_control A08
- resource motor 7 none
- resource led_strip 1 B08
- save
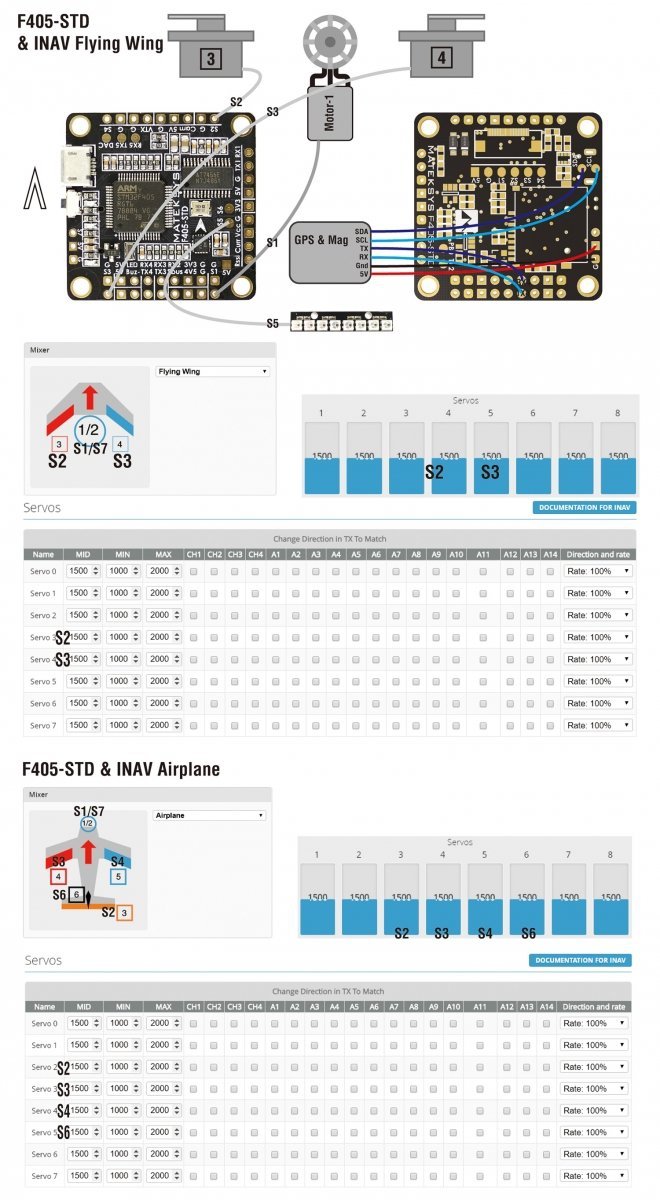
INAV Pins Definition
| Pad/Hole | Pin | Inav | INav | INav | INav | INav |
| Tricopter | Quad X | Hex X | Flying Wing | Airplane | ||
| PPM/RX2 | PA3 | |||||
| S1 | PC6 | servo-1 | motor-1 | motor-1 | motor-1 | motor-1 |
| S2 | PC7 | motor-1 | motor-2 | motor-2 | servo-3 | servo-3 / Elev |
| S3 | PC8 | motor-2 | motor-3 | motor-3 | servo-4 | servo-4 / Aile |
| S4 | PC9 | motor-3 | motor-4 | motor-4 | servo-5 / Aile | |
| S5 | PA15 | 2812LED | 2812LED | motor-5 | 2812LED | 2812LED |
| S6 | PA8 | motor-6 | servo-6 / Rudd | |||
| LED | PB6 | / | / | / | / | / |
| S7 | PB8 | motor-2 | motor-2 | |||
| SDA/SCL | Mag/Baro | Mag/Baro | Mag/Baro | Mag/Baro | Mag/Baro |
Klienci, którzy kupili ten produkt wybrali również...
")
Rurki termokurczliwe 2mm (50cm)
1,09
PLN
")
Rurki termokurczliwe 3mm (50cm)
1,30
PLN
")
Rurki termokurczliwe 4mm (50cm)
1,45
PLN
