













Kontroler lotu AfroFlight Naze32 REV5 10DOF - 32bit procesor Naze32 Acro Kontroler do małych multicopterów o bardzo dużych możliwościach rozbudowy - po podpięciu GPS i innych czujników otrzymamy kontroler o parametrach przewyższających DJI NAZA Wersja 10DOF z czujnikiem baro i magnetometrem na płytce

Cechy szczególne kontrolera Naze32:
- Bardzo prosty w obsłudze, mały i o dużych możliwościach kontroler opary na starym dobrym MultiWii
- Oprogramowanie do kontrolera jest typu open-source
- Naze32 wyposażony jest w mocny 32-bitowy procesor ARM Cortex oraz moduł czujnika 3-osiowy akcelerometr i 3-osiowy żyroskop - MPU-6050
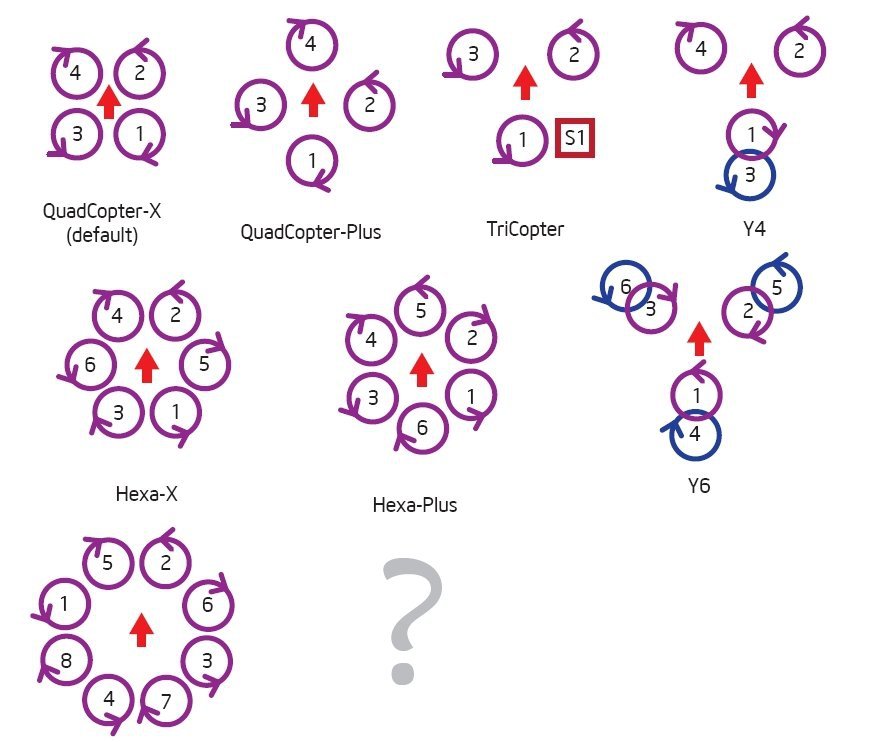
- Kontroler obsługuję wiele rodzajów konfiguracyjnych dronów: (Domyślnie jest ustawiony Quad-X)
- Quad/ Hexa / Tri / Bi / Y4 / Y6 / Octo

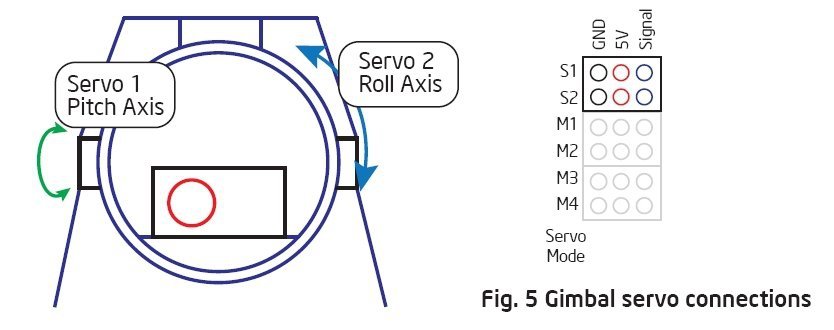
- kamera Gimbal

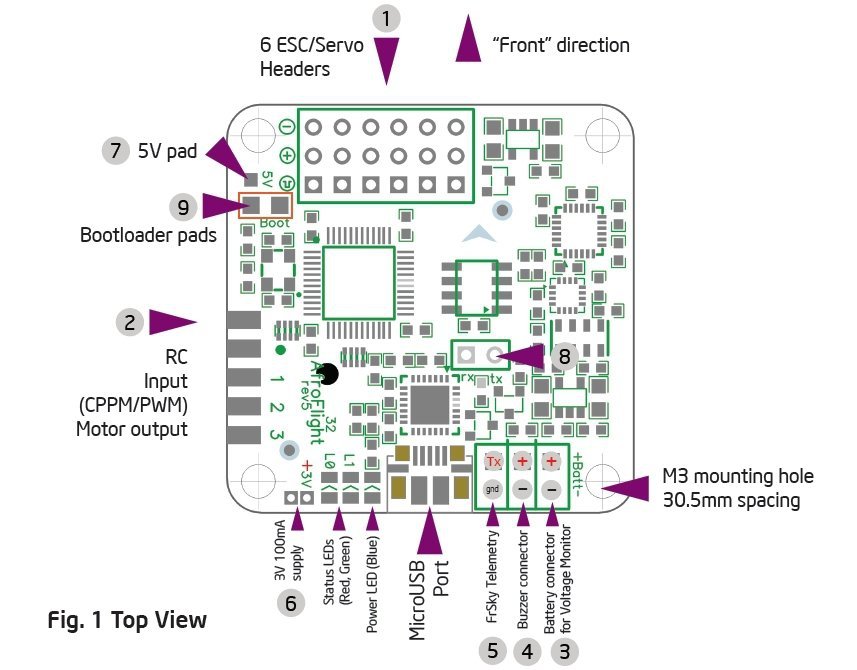
- Posiada 8-kanałowe wejścia PWM do odbiornika RC oraz obsługuję również PPM Sum (FrSky, itp) lub Spektrum odbiorniki satelitarne.
- Naze32 posiada również:
- Układ kontroli napięcia baterii
- Czujnik barometryczny (rozpoznaje ciśnienie) - kontroler potrafi utrzymać stałą wysokośc modelu od ziemi
- Magnetometr (rozpoznaje kierunek magnetyczny ziemi) - kontroler potrafi utrzymać stały kierunke wzgledem ziemi
- Wbudowany MicroUSB do instalacji i konfiguracji
- Wbudowany konwerter telemetrii FrSky
- Wysokie napięcie wejściowe do 16 V na szynie wejściowej oraz do 35 V na linii zwrotnej
- Pełny opis produktu i masa wiedzy: https://code.google.com/p/multiwii/w/list
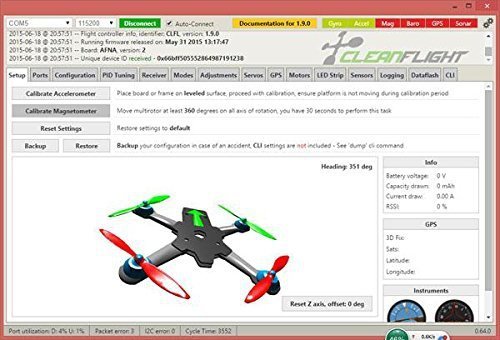
- Oprogramowanie konfiguracyjne oparte o łatwą konfigurację jak w MultiWii
- Dostępnę oprogramowanie:

- konfiguracyjne - Chrome Baseflight Konfigurator (preferowane): https://chrome.google.com/webstore/detail/baseflight-configurator/mppkgnedeapfejgfimkdoninnofofigk?hl=en
- konfiguracyjne wersja 2.3 MultiWiiConf (oparte na Javie): http://code.google.com/p/multiwii/downloads/list.
- Oprogramowanie open-source - https://github.com/multiwii/baseflight

Specyfikacja kontrolera Naze32:
- Obsługa: Quad/Hexa/Tri/Bi/Y4/Y 6/Octo/kamera Gimbal (Domyślnie jest Quad-X)
- Nowoczesny 32-bitowy procesor działa na 3.3V / 72MHz (STM32F103CB).
- 3-osiowe gyro MEMS+ akcelerometr (MPU6050)
- 3-osiowy magnetometr (HMC5883L)
- Czujnik ciśnienia (MS5611)
- Obsługa: Quad/Hexa/Tri/Bi/Y4/Y 6/Octo/kamera Gimbal (Domyślnie jest Quad-X)
- Wejścia: 8 wejść PWM, odbiornik PPM Sum (FrSky, itp) lub satelitane odbiorniki Spektrum
- Wbudowany żyroskop i akcelerometr MEMS MPU6050:
- Liczba osi: 6 (3 dla akcelerometru i 3 dla żyroskopu)
- Zakres pomiarowy żyroskopu: do 2000 °/s
- Zakres pomiarowy akcelerometru: do ±16g
- Komunikacja: magistrala I2C
- Rozdzielczość: 16-bitów dla każdej osi
- Wymiary płytki: 36x36 mm (30,5mm - otwory montażowe)
- Masa: 5,5 g (bez złącz)
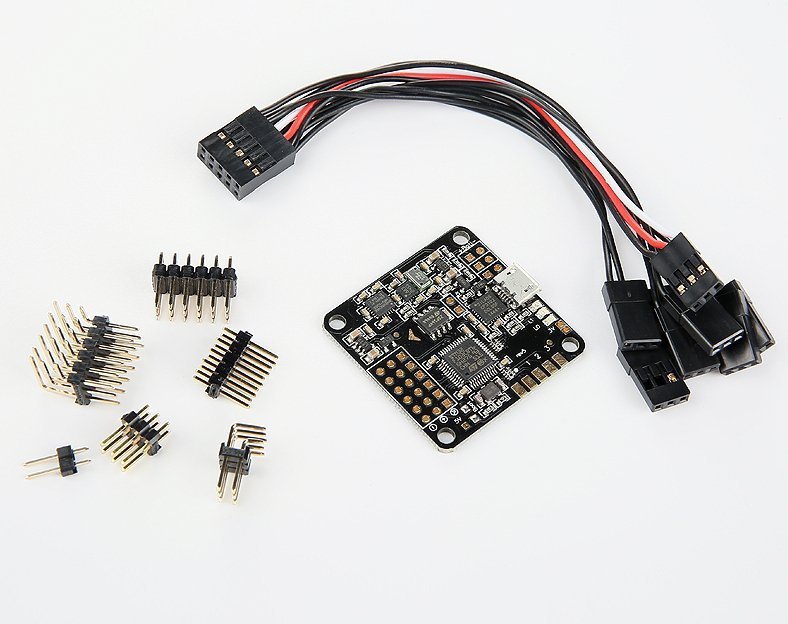
W zestawie:
- kontroler Naze32
- piny do wlutowania
- zestaw przewodów do podłaczenia z odbiornikeim RC
Polecamy








MATEK F405-TE OSD PDB Flight Controller
376,00
PLN

Foxeer M10Q 180 GPS 5883 Compass
125,00
PLN







MATEK H743-WLITE Flight Controller
563,00
PLN


MATEK F405-WMN Flight Controller
443,00
PLN


MATEK F411-WTE Flight Controller
280,00
PLN



MATEK H743-MINI V3 Flight Controller
543,00
PLN

 - FLYCOLOR do dronów wyścigowych z regulatorem 4w1")


")

MATEK F722-mini SE F7 Flight Controller
364,00
PLN
